phone:18620120943微信同号
Tel: (086)020-38077661
Fax: (086)020-38077581
QQ:![]()
阿里旺旺: ![]()
 面阵工业相机与线阵工业相机的区别1.面阵工业相机 面阵工业相机是我们常见的形式,其像元是按行列整齐排列的,每个像元对应图像上的一个像素点,我们一般所说的分辨率就是指像元的个数。需要指出的是我们计算机中的彩色图像一般是每个像素点由R、G、B三个值来表示,但我们一般的彩色工业相机却并不是这样的,下面分别进行介绍: (1)黑白工业相机,每个像素点对应一个像元,该像元对于各种波长的光具有较一致的敏感度,采集得到的只是每个像素点的灰度值。 (2)采用BAYER转化的单片彩色工业相机,这种工业相机的每个像素点实际只对应R、G、B三种之一的像元,R、G、B三种像元按一定的规律排列,我们实际所得到的每个像素点的R、G、B三原色的数值是根据该像素点及其周围若干点的三色数值进行BAYER插分计算而来的,所以这种工业相机所得到的图像往往不能得到很好的彩色效果,尤其是对应边缘位置会有较明显的色彩失真和细节的丢失。目前我们常见的彩色工业相机一般是这种形式的,其价格和同档次的黑白工业相机相近。
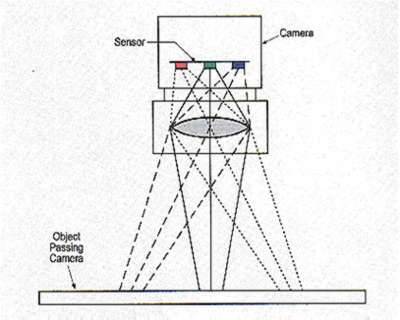
2. 线阵工业相机 线阵工业相机是一种比较特殊的形式,其像元是一维线状排列的,即只有一行像元,每次只能采集一行的图像数据,只有当相机与被摄物体在纵向相对运动时才能得到我们平常看到的二维图像。所以在机器视觉系统中一般用于被测物连续运动的场合,尤其适合于运动速度较快、分辨率要求较高的情况。 (1)黑白工业相机,也是最常用的线阵相机,每个像素点对应一个像元,采集得到的是灰度图像。 (2)3Line彩色工业相机,该相机的具有R、G、B三行像元,分别对红、绿、兰三种波长的光敏感,所以每个像素点都会对应R、G、B三个通道的数值,形成彩色的图像数据。需要注意的是,由于R、G、B三行像元在同一时刻所采集的并非同一位置的信息(见图),在实际应用中需要进行运动校正才能得到所需的彩色图像。一般的工业相机都提供内部进行运动校正处理的功能,但对于对比度非常高的图像边缘还是容易出现色彩失真的现象。
线阵工业相机虽然也是二维图象,但极长,几K的长度,而宽度却只有几个象素的而已。 一般上只在两种情况下使用这种相机: 一、被测视野为细长的带状,多用于滚筒上检测的问题。 二、需要极大的视野或极高的精度。 需要极大的视野或极高的精度的情况下,需要用激发装置多次激发相机,进行多次拍照,再将所拍下的多幅“条”形图象,合并成一张巨大的图。因此,用线阵型工业相机,必须用可以支持线阵型工业相机的采集卡。 线阵型工业相机价格贵,而且在大的视野或高的精度检测情况下,其检测速度也慢--一般工业相机的图象是 400K~1M,而合并后的图象有几个M这么大,速度自然就慢了。 对于面阵相机来说,应用面较广,如面积、形状、尺寸、位置,甚至温度等的测量。面阵相机的优点是可以获取二维图像信息,测量图像直观。缺点是像元总数多,而每行的像元数一般较线阵少,帧幅率受到限制,而线阵相机的优点是一维像元数可以做得很多,而总像元数角较面阵工业相机少,而且像元尺寸比较灵活,帧幅数高,特别适用于一维动态目标的测量。以线阵相机在线测量线径为例,就在不少论文中有所介绍,但在涉及到图像处理时都是基于理想的条件下,而从实际工程应用的角度来讲,线阵相机图像处理算法还是相当复杂的。
|